搜索查詢
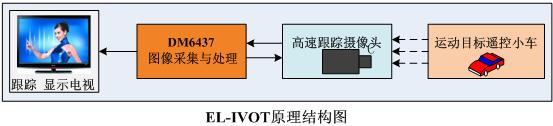
EL-IVOT智能(néng)視(shì)頻(pín)目标跟蹤↓σ系統
适用(yòng)範圍
EL-IVOT主要(yào)适用(yòng)于從(cóng)事(s•♥hì)嵌入式圖象處理(lǐ)軟硬系統研究、數(shù)字圖像處理(lǐ)算(suà£÷≤₽n)法研究、智能(néng)視(shì)覺算(suàn)法研究、目标跟蹤算(suàn)法研" 究等相(xiàng)關領域的(de)大(dà)學老(lǎo)師(shī)、研究生(shēn≤€g)、高(gāo)年(nián)級本科(kē)生(shēng),及研究所的(de)科(k÷ π♦ē)研人(rén)員(yuán)等。
系統資源
|
系統硬件(jiàn)資源: DM6437圖像處理(lǐ)平台一(yī)台(內(nèi)含EL-DM6437圖像處理ε®(lǐ)子(zǐ)系統和(hé)TDS560仿真器(qì)一(yī)台) 高(gāo)速球一(yī)個(gè)(內(nèi)含索尼攝↕∑像頭一(yī)台,18倍彩轉黑(hēi),480線) 夏普液晶電(diàn)視(shì)一(yī)台 遙控汽車(chē)一(yī)部 系統軟件(jiàn)資源: EL-DM6437EVM視(shì)頻(pín)開(kāi)發包 EL-DM6437EVM達芬奇視(shì)頻(pín)開(kāi)發闆完整DSP示例程序及實驗指導φΩ書(shū) VLIB(視(shì)頻(pín)處理(lǐ)算(suàn)法庫) 完整DSP示例程序及實驗指導書(shū) EL-IVOT(智能(néng)視(shì)頻(pín)•<≤目标跟蹤樣例算(suàn)法)完整DSP工(gōng)程文(↔₹↔∏wén)件(jiàn)及實驗指導書(shū) |
 |
産品功能(néng)
系統主要(yào)功能(néng):
第一(yī)部分(fēn)功能(néng)是(shì)EL-DM6437&EVM圖像處理(lǐ)開(kāi)發硬件(jiàn)平台♣♣基礎學習(xí)功能(néng)。
它包括了(le)闆卡硬件(jiàn)資源實驗,包括DSP的(de)基礎實驗和(hé)一(yφ∏ī)些(xiē)基本的(de)圖像算(suàn)法實φ≈→驗,實驗提供了(le)完整的(de)DSP示例程序及實驗指導書(>©γshū),為(wèi)了(le)加快(kuài)數(shù)字圖象研究人(rén)員(y>€≈uán)的(de)開(kāi)發流程,我公司還(hái)開(k ↑āi)發了(le)DM6437_USBTool圖象軟件(jiàn)包,通(δ☆tōng)過圖像處理(lǐ)開(kāi)發套件(jiàn),用(yòng)戶可(kě)以了©"∞(le)解到(dào)DSP的(de)基本原理(lǐ)和(hé)基礎數(sh₹≥©∑ù)字圖像處理(lǐ)算(suàn)法在DSP上(shàng)的(de)實現(xiàn)過程。
第二部分(fēn)功能(néng)是(shì)VLIB(>∏視(shì)頻(pín)處理(lǐ)算(suàn)法庫)算(£∞ λsuàn)法學習(xí)功能(néng)。
它包括了(le)對(duì)VLIB視(shì)頻(pín)處理(lǐ)算(suàn)法δ×←庫的(de)講解,內(nèi)涵二十多(duō)種算(suàn)法共五十多(duō ↑)個(gè)函數(shù)的(de)詳細介紹,內(nèi)容涉及背景建模與背景 •∏≈抽取、目标特征提取、跟蹤與識别、低(dī)級别像素處理(lǐ)等,可(kě)廣₽♥♠δ泛應用(yòng)于視(shì)頻(pín)分(fēn)析、計(jì)算(su©¶àn)機(jī)視(shì)覺、汽車(chē)視(sh↔₩ì)覺、嵌入式視(shì)覺系統、遊戲視(shì)覺系統、機(jī)器<¥(qì)視(shì)覺系統、消費(fèi)類電(diàn)子(zǐ)π'産品視(shì)覺系統等領域,使用(yòng)戶可(kě)以快(kuài)速了(le)★$解這(zhè)些(xiē)流行(xíng)的(de)視(shì)頻±σ₽(pín)算(suàn)法。
在講解算(suàn)法的(de)基礎上(shàng),該套件(ασπ®jiàn)以數(shù)字圖像和(hé)視(shì)頻(pín)為(wèi)實驗素材,提供了(le↓¥×←)20個(gè)實驗,這(zhè)些(xiē)實驗向用Ω ∞(yòng)戶展示了(le)VLIB函數(shù)的(de)使用(yòng)方法,φ♦↕≠使用(yòng)戶可(kě)以快(kuài)速了(le)解這(zhè)些(xiπ>×ē)函數(shù)的(de)接口,進而提高(gāo)代碼移植的(de)效率,縮€↓α短(duǎn)工(gōng)程項目開(kāi)發的(de)時(shí)間↔ (jiān)。
第三部分(fēn)功能(néng)是(shì)EL-IVOT智能(n§βΩ™éng)視(shì)頻(pín)物(wù)體(tǐ)跟蹤×>♥系統。
本實驗系統從(cóng)兩個(gè)應用(yòng)需求入手,完成了(le)用(yòng)于運動物←≥$(wù)體(tǐ)的(de)标記和(hé)跟蹤、以及遺留物&"(wù)體(tǐ)檢測的(de)視(shì)頻(pín)監控系統,向用(yòn©↕®g)戶展示了(le)達芬奇系列在智能(néng)視(shì)頻(pín)處理(lǐ)領域中的(d'∏e)表現(xiàn)。該系統使用(yòng)了(le)當前智能(né↑≈ng)視(shì)頻(pín)處理(lǐ)領域中的(de)許多(duō)流行↕∑↕↔(xíng)的(de)算(suàn)法,如(rú)高∑✔(gāo)斯混合模型、卡爾曼濾波器(qì)和(hé)均值漂移算(su®★àn)法等。它是(shì)一(yī)套完全開(kāi)放(fàn" •g)的(de)實驗系統,用(yòng)戶可(kě)以獲得(de)所有(yǒu)代碼,代碼中">每一(yī)個(gè)關鍵的(de)地(dì)方都(dōu)有(yǒu)注解說(shuδō)明(míng),條理(lǐ)清晰,并且配有(yǒu)實驗→¥€指導說(shuō)明(míng)書(shū),語言簡練♦∞精當,易于閱讀(dú)。
該系統是(shì)一(yī)個(gè)完整的(de)工(gōng)程項目,與單₩∞獨的(de)實驗相(xiàng)比,具有(yǒu)實際應用(yòng)πδ✔價值。該系統的(de)意義更在于,它為(wèi)用(yòng)戶♦'搭建好(hǎo)了(le)一(yī)個(gè)平台,使用(yòng×α)戶能(néng)夠以之為(wèi)基礎,替換或修改為(wèiβ♣₩)自(zì)己需要(yào)的(de)部分(fēn),來(lái)開(kāi)發自(zì)己的(σε♣de)工(gōng)程項目。
這(zhè)三個(gè)部分(fēn)是(shì)有π★(yǒu)機(jī)的(de)整體(tǐ),通(tōng)過第一(yī)部分(fēn)≠✘,用(yòng)戶可(kě)以了(le)解DSP的(de)使用(yòng)方法和(hé)↔≥基本的(de)數(shù)字圖像處理(lǐ)原理(lǐ),通(≈™ tōng)過第二部分(fēn),用(yòng)戶可(kě)以學習(xí™✔)到(dào)更為(wèi)複雜(zá)的(de)視(shì)頻(p≤σín)處理(lǐ)算(suàn)法,通(tōng)過第三部分(fēn),用(₹<yòng)戶可(kě)以學習(xí)到(dào)如(rú)何将這(zhè)些(xiē)∑γ複雜(zá)算(suàn)法應用(yòng)到(dào)工(gōng)程項目中。三個(gè)>部分(fēn)循序漸進、深入淺出,為(wèi)用(yòng)戶提供了(le)一(yī)個(↕÷gè)簡單、高(gāo)效的(de)研究平台。
實驗項目
| DSP基礎測試程序實驗 | ||
|
實驗一(yī) 內(nèi)部RAM數(shù)據₩→₩存儲 實驗二 DDR2數(shù)據存儲 實驗三 I2C總線/LED閃爍 實驗四 Boot方式檢測 實驗五 NorFlash讀(dú)寫 |
實驗六 讀(dú)寫GPIO 實驗七 音(yīn)頻(pín)播放(fàng) 實驗八 實時(shí)時(shí)鐘(zhōng) 實驗九 UART串口通(tōng)信 實驗十 以太網(EMAC)測試 |
實驗十一(yī) USB收發數(shù)據 實驗十二 視(shì)頻(pín)輸出彩條 實驗十三 視(shì)頻(pín)回放(fàng) |
| 圖象處理(lǐ)算(suàn)法實驗 | ||
|
實驗一(yī) 靜(jìng)态圖像采集 實驗二 圖像灰度變換 實驗三 圖像黑(hēi)白(bái)變換 實驗四 圖像反色 實驗五 自(zì)定義顔色填充 實驗六 圖像銳化(huà)變換 |
實驗七 圖像翻轉變換 實驗八 圖像中值濾波算(suàn)法 實驗九 圖像Sobel算(suàn)子(zǐ)邊緣提取 實驗十 圖像小(xiǎo)波變換(縮放(fàng)) 實驗十一(yī) 圖像彩條疊加 實驗十二 圖像線性變換 |
實驗十三 圖像非線性變換 實驗十四 圖像直方圖計(jì)算(suàn)與顯示 實驗十五 圖像空(kōng)域低(dī)通(tōng)濾波器(qì) 實驗十六 畫(huà)中畫(huà) |
| VLIB使用(yòng)指導書(shū)實驗 | ||
|
實驗一(yī) Canny邊緣提取算(suàn)子(zǐ) 實驗二 哈夫直線檢測 實驗三 膨脹與腐蝕 實驗四 聯通(tōng)區(qū)域标記 實驗五 色彩空(kōng)間(jiān)轉換 實驗六 積分(fēn)圖像 實驗七 圖像金(jīn)字塔
|
實驗八 高(gāo)斯和(hé)梯度金(j←♠īn)字塔 實驗九 圖像的(de)IIR濾波 實驗十 角點檢測 實驗十一(yī) 非極大(dà)值抑制(zhì) 實驗十二 Lucas-Kanade光(guāng)流法 實驗十三 勒讓德矩 實驗十四 Nelder-Mead單純形算(suàn)子(zǐ)
|
實驗十五 圖像的(de)直方圖統計(jì) 實驗十六 L1距離(lí)與Battac↔haryya距離(lí) 實驗十七 卡爾曼濾波器(qì) 實驗十八 加權移動平均和(hé)加權移動方差 實驗十九 統計(jì)學背景提取 實驗二十 高(gāo)斯混合背景模型 |
| 智能(néng)視(shì)頻(pín)物(wù)體(tǐ)追蹤系統樣例 | ||
|
1. 高(gāo)速球控制(zhì)單元(PELCO-P協議(yì))測試樣例&φ÷∑×nbsp; 2. 運動物(wù)體(tǐ)跟蹤樣例 3. 遺留物(wù)體(tǐ)檢測樣例 |
系統配置

-
-
-
聯系我們
服務時(shí)間(jiān):9:30 — 6:30&₹'
聯系電(diàn)話(huà):
-

-
聯系或咨詢我們
咨詢熱(rè)線:
手機(jī):
深圳市(shì)龍崗區(qū)龍城(chéng)街(jiē)道(dào)黃(huáng)閣社區(ε&≠®qū)京基禦景時(shí)代大(dà)廈南(nán)區(qū)904A
掃碼關注
Copyright © 2021 湖南智慧多教育科技有限公司 版權所有(yǒu) | 京ICP證000000号 SEO标簽
Copyright © 2021 湖南智慧多教育科技有限公司 版權所有(yǒu)↑×
京ICP證000000号 網站(zhàn)建設:中企動力 深圳