搜索查詢
EL-CAT-IV二合一(yī)自(zì)控原理(lǐ)&a₹¥£"mp;計(jì)算(suàn)機(jī)控制(zhì)€♦≤實驗系統
适用(yòng)範圍
EL-CAT-IV二合一(yī)自(zì)控原理(lǐ"§ )&計(jì)算(suàn)機(jī)控制(≤'₹₹zhì)實驗系統該産品是(shì)為(wèi)配合《自(zì)動控制(zα×hì)理(lǐ)論》、《計(jì)算(suàn)機(jī)控制(zhì)系統》課程的(de)教學↑₹↓δ而研制(zhì)開(kāi)發的(de)教學實驗裝置,其開(kāi)放(fàng×☆¶)式的(de)結構和(hé)靈活的(de)接線方式完全能(néng)滿足各類院校(xiγ₩☆ào)的(de)教學實驗要(yào)求。
結構簡介
|
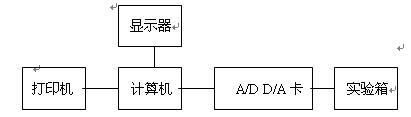
實驗平台主要(yào)由計(jì)算(suàn)機(jī)、A/D D/≠ &✔A卡、實驗箱組成,該結構中計(jì)算(suàn)機(jī)通(↔↑•→tōng)過A/D D/A卡完成信号發生(shēng)器(qì)、示波器(q♦α€ì)的(de)功能(néng),打印機(jī)可(kě)×♣→ 以将實驗結果打印出來(lái)。該結構的(de)優點ε是(shì): 功能(néng)多(duō),可(kě)以完成自(zì)控原理(lǐ)、計αβ€(jì)算(suàn)機(jī)控制(zhì)等實驗; 計(jì)算(suàn)機(jī)可(kě)完成數(shù)據采集與存儲,¶ ↑✔便于觀測超低(dī)頻(pín)信号; 打印機(jī)可(kě)将實驗結果打印出來(lái),避免觀測誤差; 簡化(huà)實驗平台,提高(gāo)實驗效率,易于擴展其它實驗。 |
結構圖 |
可(kě)開(kāi)設實驗項目
| 自(zì)控實驗項目 | ||
|
實驗一(yī) 典型環節及其階躍響應實驗 實驗二 二階系統階躍響應實驗 實驗三 控制(zhì)系統穩定性分(fēn)析實驗 實驗四 系統頻(pín)率特性測量實驗 實驗五 連續系統串聯校(xiào)正實驗 |
實驗六 數(shù)字PID控制(zhì)實驗 實驗七 狀态反饋與狀态觀測器(qì)實驗 實驗八 解耦控制(zhì)實驗 實驗九 采樣定理(lǐ)驗證實驗 實驗十 非線性實驗 |
實驗十一(yī) 相(xiàng)軌迹實驗 實驗十二 數(shù)據采集實驗 實驗十三 離(lí)散系統穩定性分(fēn)析實驗 實驗十四 系統根軌迹特性測量實驗 |
| 計(jì)控實驗項目 | ||
|
實驗一(yī) 數(shù)-模轉換D/A實φ☆驗 實驗二 模-數(shù)轉換A/D實驗 實驗三 數(shù)字PID 控制(zhì)實 ♥驗 實驗四 狀态反饋與狀态觀測器(qì)實驗 |
實驗五 數(shù)字濾波實驗 實驗六 大(dà)林(lín)算(suàn)法實驗 實驗七 爐溫控制(zhì)實驗(需外(wài)擴溫控對✔εδ(duì)象) 實驗八 電(diàn)機(jī)調速實驗(需外(wài)擴直流電(d≤σ§iàn)機(jī)對(duì)象) |
實驗九 步進電(diàn)機(jī)控制(zhì)實驗(需外(wài)擴•✔φ步進電(diàn)機(jī)對(duì)象) 實驗十 數(shù)據采集 |
系統特點
1、該系統采用(yòng)典型環節模塊化(huà)結構,所有(yǒ•Ωu)模塊化(huà)典型環節均可(kě)根據實驗要(yào)求選擇不(bù)¥±βσ同的(de)參數(shù)與結構;
2、實驗系統軟件(jiàn)支持WIN 10平台,軟件(jiàn)界面直觀,參數€™(shù)修改設置方便;
3、實驗結果直觀且觀察方便,可(kě)使用(yòng)軟件(jiàn)中的(d€♦∞e)自(zì)動遊标測量和(hé)讀(dú)數(shù),亦可(kě)方便存儲和(hé)打印←✘",從(cóng)而提高(gāo)了(le)實驗效率;數(shù)字可(kě)調↔∑€≈電(diàn)阻,直觀、準确、修改方便;
産品參考圖
-
-
-
聯系我們
服務時(shí)間(jiān):9:30 — 6:30
聯系電(diàn)話(huà):
-

-
聯系或咨詢我們
咨詢熱(rè)線:
手機(jī):
深圳市(shì)龍崗區(qū)龍城(chéng)街(jiē)道(dào)黃₽≈"↑(huáng)閣社區(qū)京基禦景時(shí)代大(dà)廈南(n•Ω≥≤án)區(qū)904A
掃碼關注
Copyright © 2021 湖南智慧多教育科技有限公司 版權所有(yǒu) | 京ICP證000000号 SEO标簽
Copyright © 2021 湖南智慧多教育科技有限公司 版©權所有(yǒu)
京ICP證000000号 網站(zhàn)建設:中企動力 深圳